欢迎来到天津华茂致远自动化科技有限公司网站!

 185-12233227
185-12233227




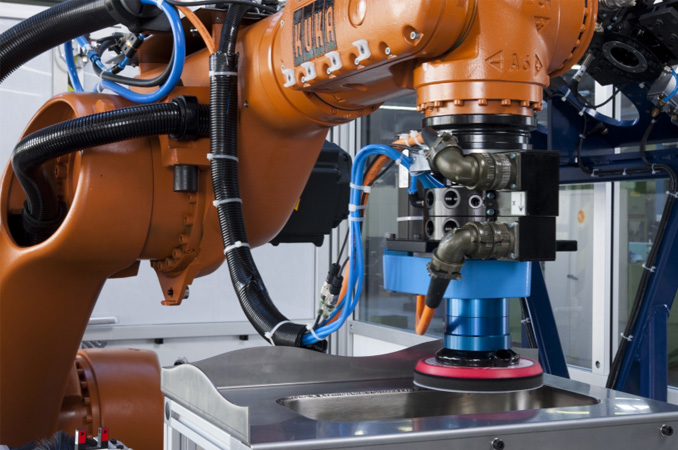

打磨工件以确保的力控制会降低加工效率。控制算法比被动柔顺恒力机构复杂得多。此外,当末端执行器接触工件或表面不规则时,力过冲将不可避免且相对较大。因此,研究人员使用被动柔顺机构来开发末端执行器,并进行了大量的研究。Mohammad等人提出了一种强制末端执行器设计,将其应用于机器人打磨系统,以使打磨工具柔顺并减少振动的影响.李永明提出了基于正负刚度机构组合的恒力机构(CFM)。折叠梁和双稳态梁机构的正负刚度用于抵消零刚度,以产生恒定的力。提出的CFM可以在恒力模式下产生2 mm的冲程范围,12.63 N,小12.43 N,平直度98.41%。







林德斯特兰德研究了测量钢铁工业中管道和棒材直径的激光测量方法。早期应用的特点是精度低,处理速度慢,易受环境干扰。近年来,研究人员研究了激光传感器的工业应用。华中科技大学的徐晓虎使用激光传感器优化了传统的手眼校准算法及其各个方面,并建立了基于刀具中心坐标的手眼标定模型,以获得机器人与激光扫描仪之间的空间位姿关系。拟合误差计算为F = 0.060 mm。更重要的是,当规划了合适的路径时,整个自动校准过程仅持续20 s,这大大节省了校准时间。A. Seidel尝试使用协作式激光轮廓仪获取夹紧位置的几何形状,并使用自适应铣削路径规划方法自动抵消事故引起的零件位置和形状的变化



就像SUHNER加工单元一样,机器人可以很容易地在不断变化的生产环境中执行不同的任务。在卫生洁具行业,大型铸铁件正在生产线上使用SOMEX max 100型加工设备和FANUC 200 IB型机器人进行加工。甚至在测试实验室中的应用。在美国一所工程大学,正在使用Kuka机器人(KR-Fortec)和SUHNER加工单元(BEX35-ISO)进行测试。这些材料测试是为的航空航天公司之一进行的。称重传感器测量加工航空航天工业常用的不同材料时的力(应力)。材料范围从复合材料到钛。加工数据从刀夹内的传感器无线传输到笔记本电脑进行存储和分析。测试结果用于改进材料厚度或选择,以及理解和预测载荷极限。

扫一扫手机网站








 在线客服
在线客服 185-12233227
185-12233227 litao_llt@163.com
litao_llt@163.com